Une main robotique innovante
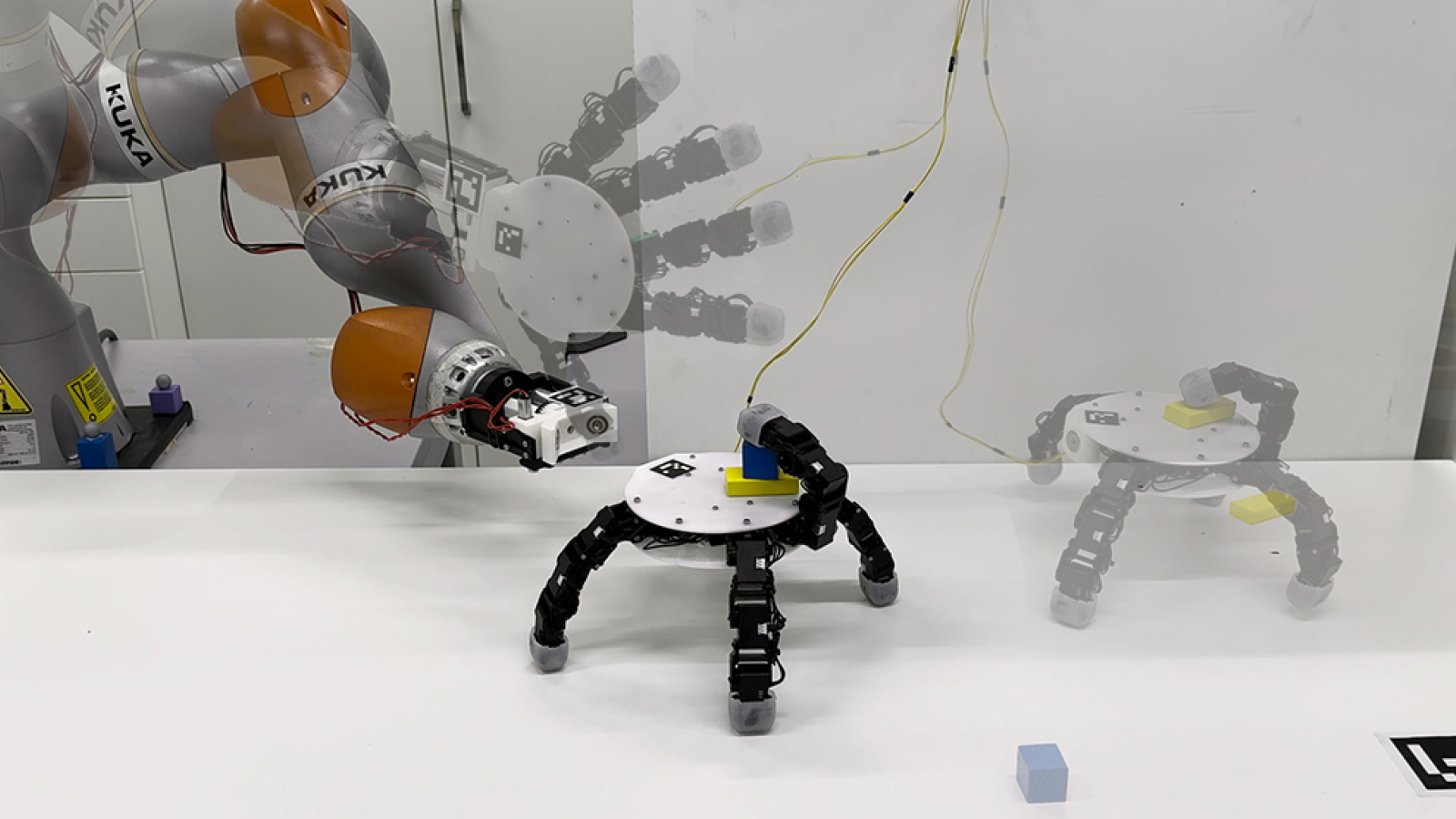
Des ingénieurs ont conçu une main robotique détachable capable de se glisser dans des espaces difficiles d’accès pour récupérer des objets. Ce dispositif, évoquant un araignée, peut être équipé de plusieurs doigts et offre une fonctionnalité réversible. Cela signifie qu’il peut saisir des objets dans les deux sens et fonctionne comme s’il avait deux paumes.
Une avancée technologique
Une étude, parue le 20 janvier dans le journal Nature Communications, a été menée par des scientifiques de l’École polytechnique fédérale de Lausanne (EPFL). Ils expliquent que ce robot a été développé pour allier deux avantages souvent séparés en robotique : la manipulation et la locomotion. La main peut fonctionner indépendamment d’un robot mobile complet. Au lieu de cela, elle se détache d’un bras robotique et se déplace seule où elle est requise, saisissant l’objet avant de revenir se rattacher.
Applications potentielles
Cette technologie pourrait être précieuse dans des situations où des robots doivent atteindre ou récupérer des objets dans des espaces trop étroits ou dangereux pour des humains, tels que dans des environnements industriels ou lors de missions d’exploration. Les chercheurs ont souligné que l’accès à des objets difficilement accessibles, comme ceux situés sous les meubles ou derrière des étagères, est souvent limité par la structure de la main humaine, rendant certaines tâches très compliquées.
Limitations humaines
Aude Billard, co-auteur de l’étude et responsable du Laboratoire d’algorithmes et de systèmes d’apprentissage à l’EPFL, a indiqué que la main humaine présente certaines limitations biologiques. Par exemple, il est souvent difficile de saisir des objets tout en maintenant une prise stable, ce qui nécessite des contorsions du poignet ou des réajustements corporels. Ce robot, quant à lui, est un système autonome qui peut soit agir comme un préhenseur normal, soit se mouvoir indépendamment. Sa conception s’inspire de la nature, imitant le mouvement des bras d’un poulpe ou des membres d’une mante religieuse.
Performances du robot
Les chercheurs ont testé la main dans divers exercices standards de préhension, illustrant sa capacité à exécuter des tâches délicates que les humains trouvent généralement difficiles. Elle peut maintenir en même temps jusqu’à quatre objets différents ou saisir des articles sans utiliser le pouce. Chaque doigt est contrôlé par de petits moteurs électriques et des articulations en plastique imprimé en 3D, lui permettant de bouger de manière souple. Contrairement à une main humaine, les articulations des doigts peuvent se plier dans les deux sens, offrant ainsi plus de flexibilité.
Système de fixation
La main se rattache au bras par un système “snap-and-lock”. Des magnets permettent d’aligner les connecteurs, tandis qu’un petit moteur actionne un verrou qui fixe les joints en place. Selon l’équipe, ce système pourrait à terme être adapté pour des prothèses humaines ou des augmentations corporelles, bien que cela ne soit pas l’objectif principal du prototype actuel.
Potentiel d’adaptation
Billard souligne que cette fonctionnalité réversible est particulièrement avantageuse dans des scénarios où les utilisateurs pourraient tirer profit de capacités dépassant celles de la main humaine. Des études précédentes ont démontré que le cerveau humain est capable de s’adapter pour intégrer des appendices supplémentaires, suggérant que des configurations non traditionnelles pourraient s’avérer utiles dans des environnements spécialisés nécessitant des habiletés de manipulation augmentées.
FAQ
Quelle est la principale fonction de cette main robotique ?
Elle est conçue pour récupérer des objets dans des espaces difficiles d’accès, offrant une flexibilité de mouvement inédite pour un appareil robotique.
Comment est-ce que la main se rattache au bras robotique ?
Elle utilise un système de verrouillage qui s’assure que les connexions sont faites de manière précise et sécurisée grâce à des magnets et un moteur.
Quelles sont les applications potentielles de cette technologie ?
Elle pourrait servir dans des contextes tels que l’aide aux secours en cas de catastrophe, dans l’industrie ou pour des missions d’exploration exigeant des déplacements dans des espaces restreints et dangereux.
Quels avantages ce robot a-t-il par rapport aux mains humaines ?
Il peut se mouvoir seul, saisir des objets avec une plus grande flexibilité et exécuter des tâches complexes sans participer à la fatigue physique ou aux limitations anatomiques humaines.
Ce robot a-t-il été conçu pour remplacer les mains humaines ?
Non, il est destiné à compléter les capacités humaines, en fournissant une assistance là où la main humaine pourrait atteindre ses limites.
Cela peut vous intéresser